Schools of newly-designed robotic fish could one day patrol waterways, swimming around as fluidly as the real fish they're based on, looking for environmental pollutants and inspecting submerged structures, such as boats and oil pipelines.
Mechanical engineers Kamal Youcef-Toumi and Pablo Valdivia Y Alvarado designed the sleek robotic fish to more easily maneuver into areas where traditional underwater autonomous vehicles can't go.
"Given the (robotic) fish's robustness, it would be ideal as a long-term sensing and exploration unit. Several of these could be deployed, and even if only a small percentage make it back there wouldn't be a terrible capital loss due to their low cost," said Valdivia Y Alvarado, a recent MIT Ph.D. recipient.
How it works
{{ video="LS_090824_hybrid-fish" title="Robo-fish Swim Like the Real Thing" caption="A robotic fish swims in the same way as real bass do, undulating its flexible body with help from a motor in its belly." }}
Robotic fish are not new: In 1994, MIT ocean engineers demonstrated Robotuna, a four-foot-long autonomous fish.
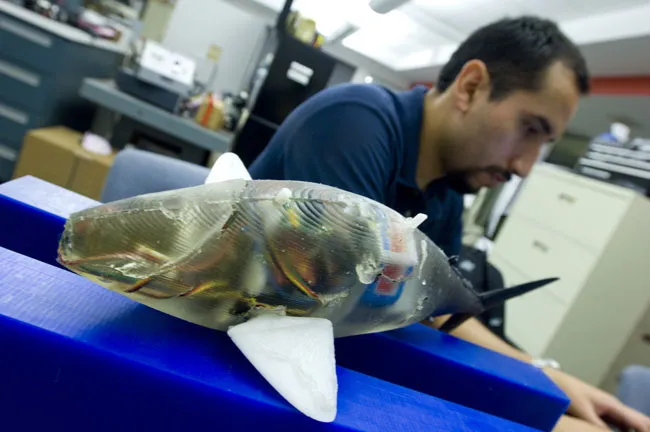
But while Robotuna had 2,843 parts controlled by six motors, the new robotic fish, each less than a foot long, are powered by a single motor and are made of fewer than 10 individual components, including a flexible, compliant body that houses all components and protects them from the environment.
The motor, placed in the fish's midsection, initiates a wave that undulates along the fish's flexible, continuous body, which is how real fish propel themselves through the water.
Researchers have also mechanically mimicked bats, bugs, snakes, and of course, humans.
The MIT team's first robotic fish prototypes, about five inches long, mimic the carangiform swimming technique used by bass and trout. Most of the movement takes place in the tail end of the body. Fish that use this type of motion are generally fast swimmers, with moderate maneuverability.
Later versions of the robo-fish, about eight inches long, swim like tuna, which are adapted for even higher swimming speeds and long distances. In tuna, motion is concentrated in the tail and the peduncle region (where the tail attaches to the body).
Slow but steady
Real fish are exquisitely adapted to moving through their watery environment, and can swim as fast as 10 times their body length per second. So far, the MIT researchers have gotten their prototypes close to one body length per second — much slower than their natural counterparts but faster than earlier generations of robotic fish.
The models were first proposed in the journal Dynamic Systems Measurements and Control (ASME) and will be detailed in Valdivia Y Alvarado's doctoral thesis.
Later this fall, the researchers plan to expand their research to more complex locomotion and test some new prototype robotic salamanders and manta rays.
"The fish were a proof of concept application, but we are hoping to apply this idea to other forms of locomotion, so the methodology will be useful for mobile robotics research — land, air and underwater — as well," said Valdivia Y Alvarado.
The work was funded by the Singapore-MIT Alliance and Schlumberger Ltd.
- Video – Robo-fish Swim Like the Real Thing
- Robot News, Images and Information
- 5 Reasons to Fear Robots












