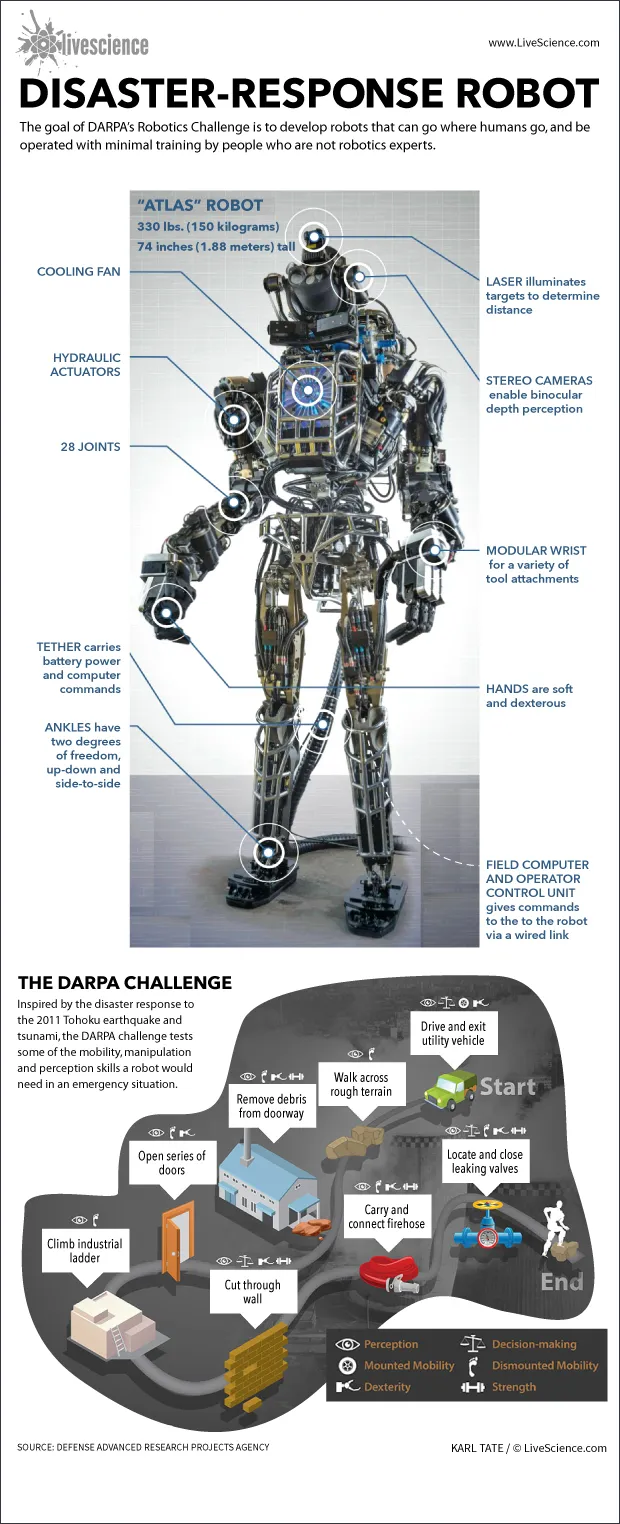
Inspired by the disaster response to the 2011 Tohoku earthquake and tsunami, the DARPA challenge tests some of the mobility, manipulation and perception skills a robot would need in an emergency situation.
First, robots must drive and exit a utility vehicle. Then they walk across rough terrain and remove debris from a doorway. The robots open a series of doors, climb an industrial ladder and cut through a wall. Then they carry and connect a firehose. Lastly, the robot must locate and close leaking valves.
These test check a robot’s perception, mobility, manual dexterity, decision-making capacity and strength.
To pass the tests, a robot must have specific capabilities. The “Atlas” robot, one of the challengers, weighs 330 lbs. (150 kilograms) and is 74 inches (1.88 meters) tall.
Atlas has 28 joints in its body. Limbs are hydraulically actuated. The ankles have two degrees of freedom, and can move side-to-side as well as up and down. The wrists are modular to allow for a variety of tool attachments. The hands are soft and dexterous.
On its head, Atlas carries stereo video cameras to enable binocular depth perception. A LIDAR system fires a laser to illuminate targets for determining distance.
A tether links Atlas to its battery power and communications systems. An operator can send commands to Atlas through a wired link.




